Our robot
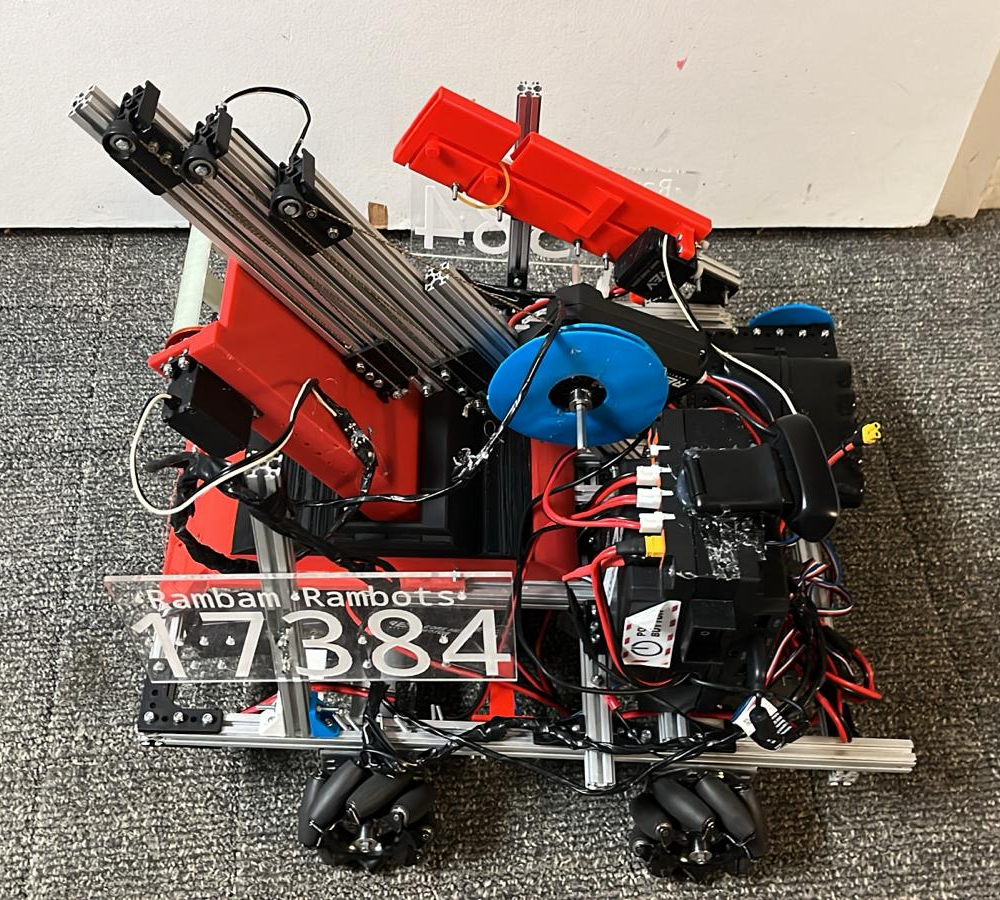
Our robot for this year's challenge
Meet Popcorn
During a meeting in January, one of our team members decided to make microwaved popcorn. This set off the fire alarm in our lab and confused many of our school’s administrators.
The robot's name was then decided unanimously.
The Frame
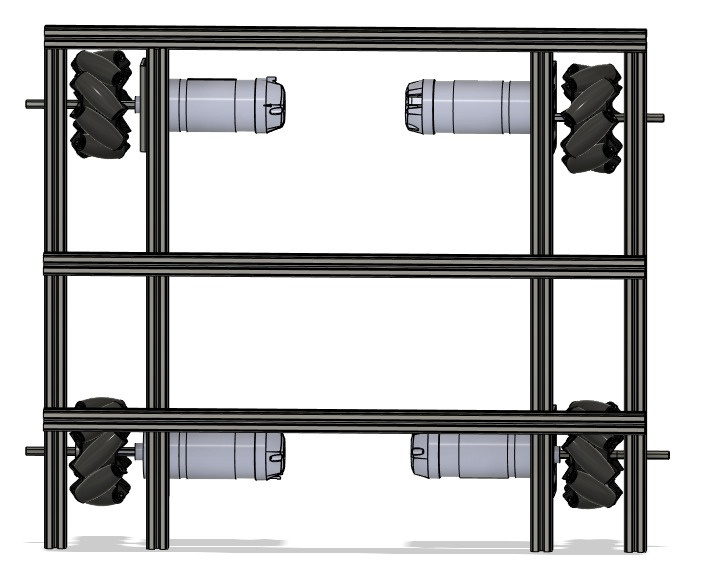
Three years ago, we purchased a set of mecanum wheels for the 360-degree driving they enabled. We decided to reuse these same wheels and motors (Rev HD Hex Motors with a 40:1 Gearbox) for our robot's drivetrain.
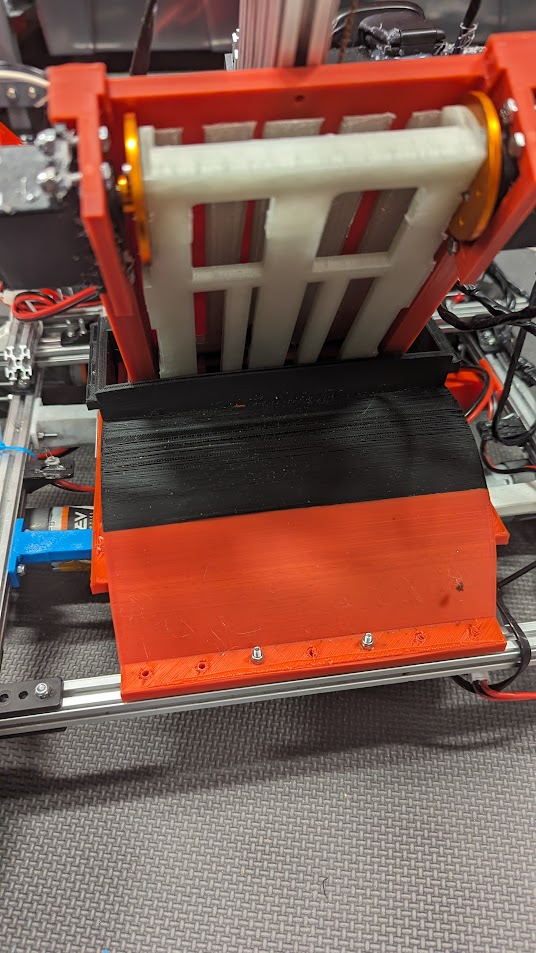
The Intake
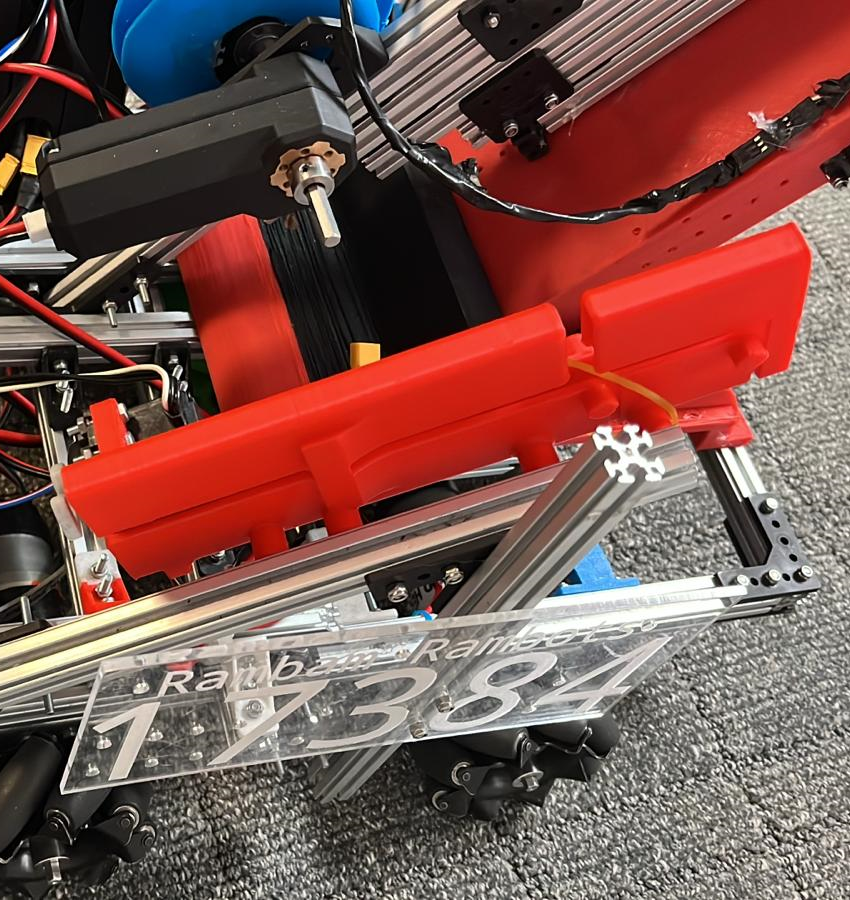
Our intake system is composed of two Andymark compliant wheels that spin in opposite directions (by two Core Hex Motors, each with a 40:1 Gearbox) to propel pixels upward into our pocket when driven over. The system guides pixels into our pocket using a 3D-printed funnel, fed by two laser-cut plastic-composite rectangles attached to the underside of our robot.

The Arm and Pocket
Our arm is a four-stage cascading linear slide powered by a 40:1 Core Hex Motor, with a custom-printed pocket secured on the final extrusion by hexagonal screws. Our intake system feeds our pocket, which consists of two separate 3D-printed pieces. Pixels are kept inside the pocket by rotating "teeth" along the interior piece, while two Rev servos attached to servo horns rotate the exterior piece to place pixels on the backdrop.
CAD Files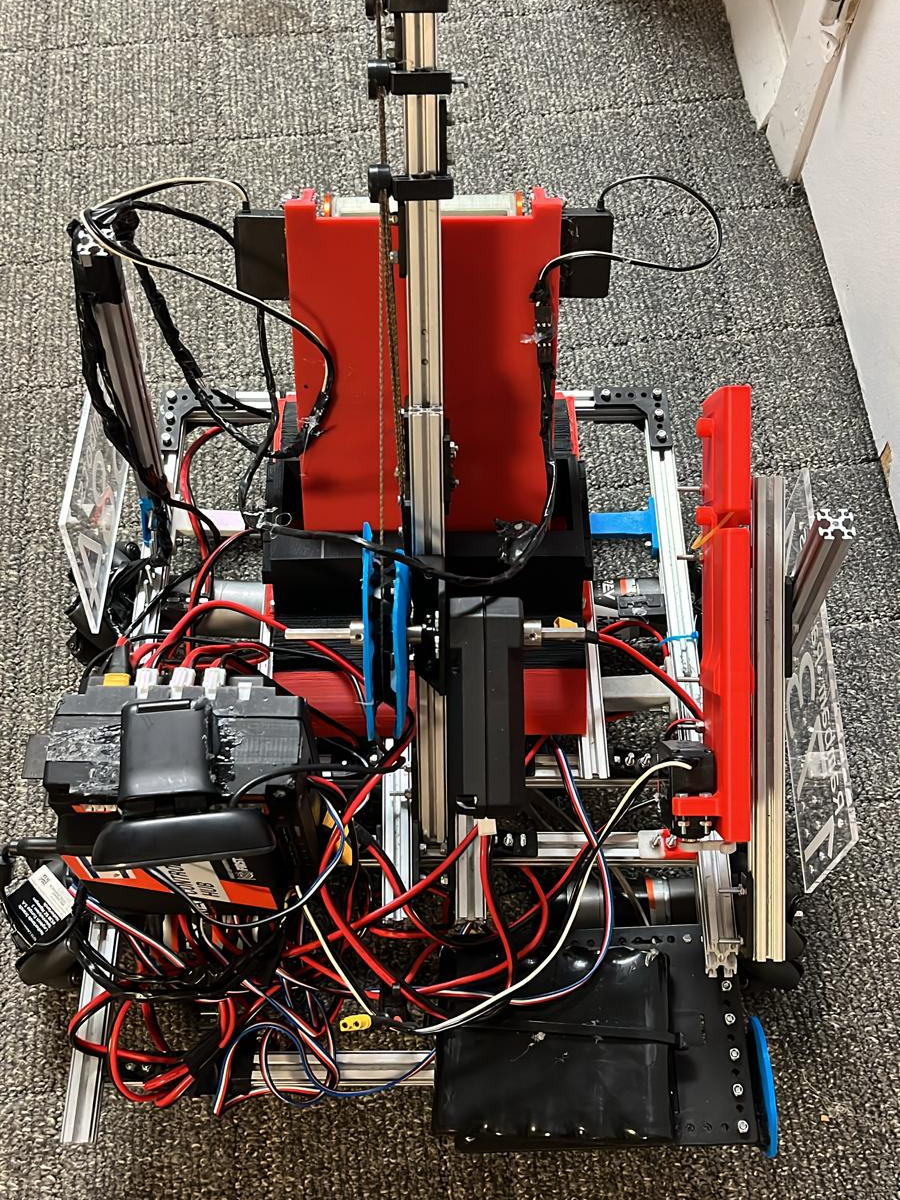
The Code
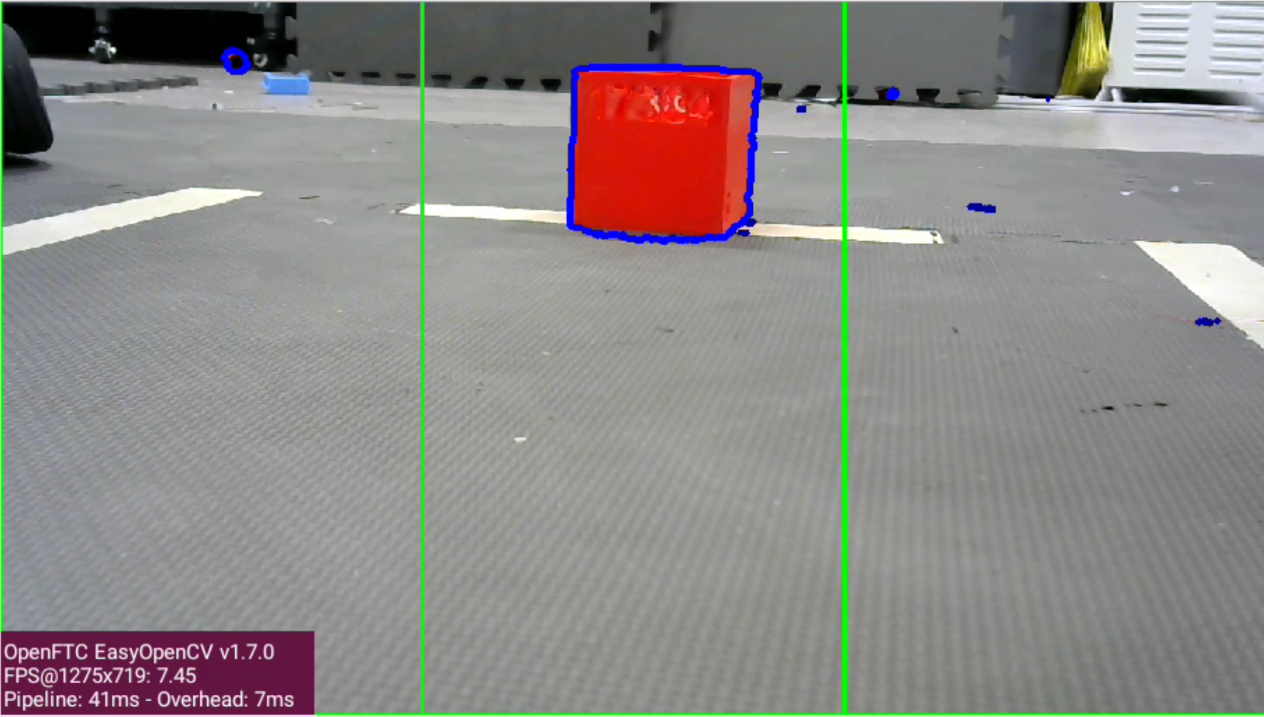
Popcorn's code is written in Java using Android Studio and we use GitHub to collaborate and share our code with other teams. Our robot’s code can be found on our website. During our autonomous mode, we utilize OpenCV to mask out all non-red/blue colors (depending on our alliance). Our webcam's view is then split into three rectangular segments, with each being scanned for our alliance-colored prop. The segment containing our prop is selected, and preprogrammed driving instructions are executed. Previously, we had issues with object detection, but that was solved by detecting the area of the prop as opposed to its surrounding rectangle.
GitHub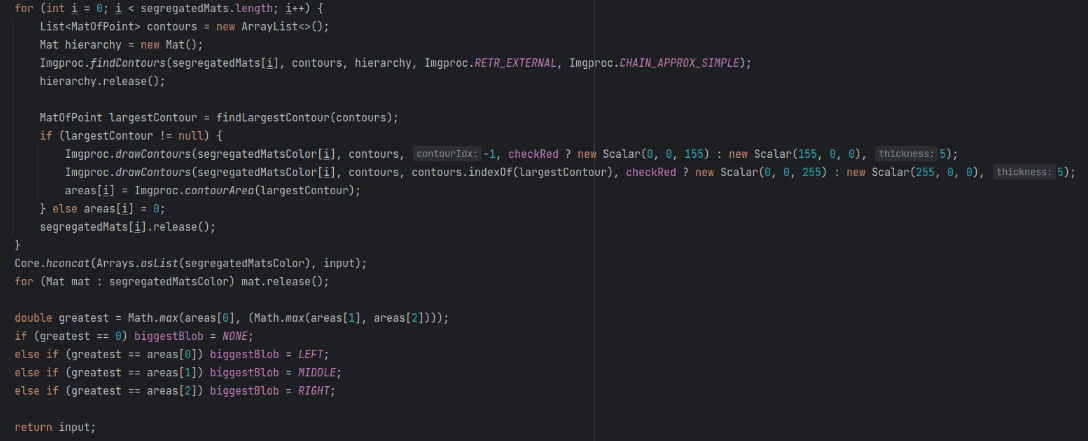
The Drone
We collaborated with team 14380 Blue BotBuilders to design a custom drone launcher powered by a Rev servo to launch our drone into the first zone using a rubber band released by a servo horn
Other
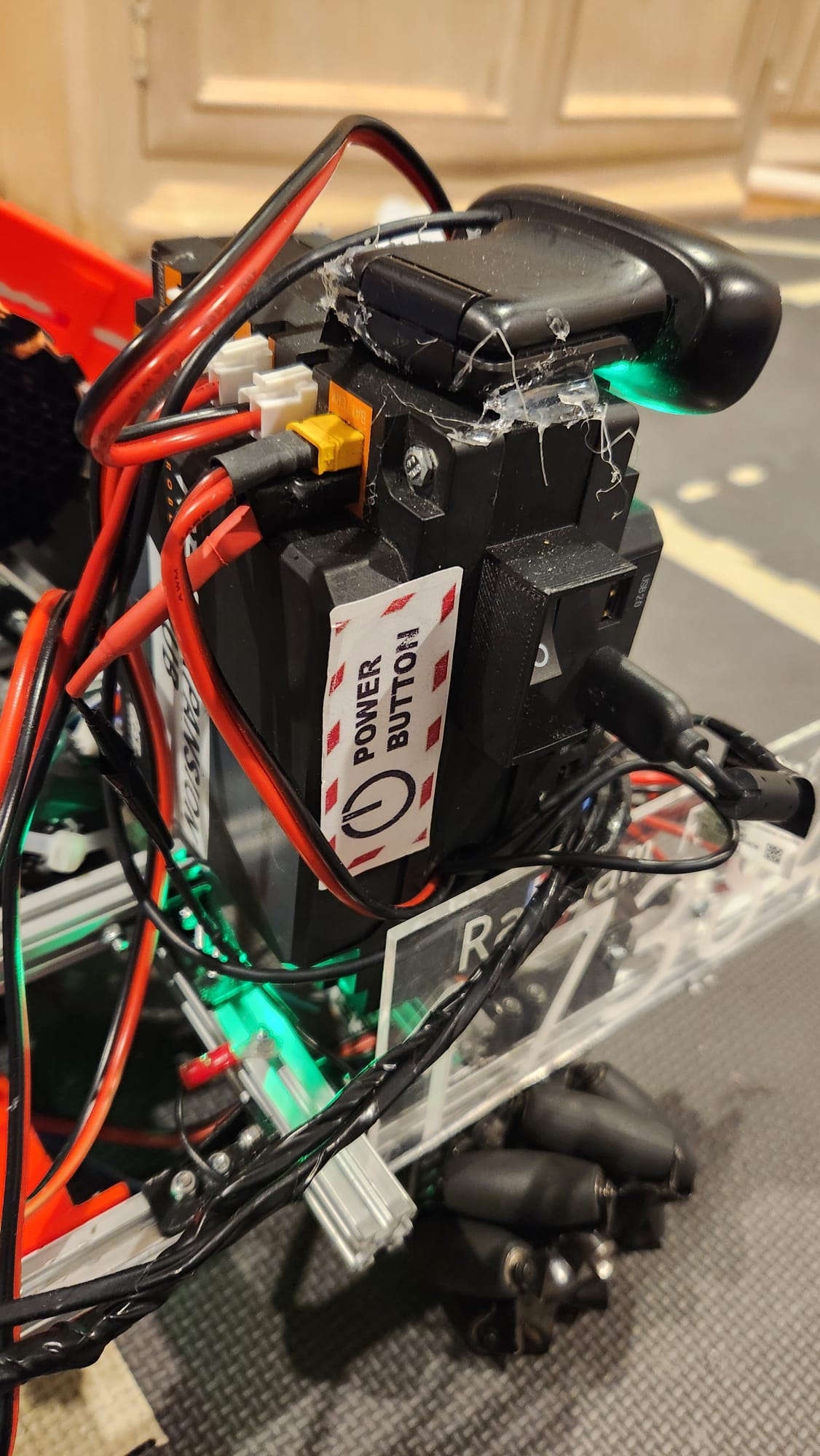
To free up space, team member Shmuli M. designed a mount for the control hub and expansion hub. This holds them up vertically, with an empty space in the middle for wires to cleanly hide in.
Our team prop was designed with simplicity in mind. Because we don't have to do anything besides use it for object recognition this year (last year the prop was used to cap the junctions), we simply printed a small 3x3x3 inch cube.